Several recent studies have focused on developing free-flying robots (NASA Astrobee and JAXA Int-Ball, etc.) that perform a variety of intra-vehicular activities and tasks in microgravity on the international space station(ISS). While accurate and robust in-spacecraft navigation is critical for the missions of intra-vehicular robots, a dataset for visual navigation in a spacecraft has not yet existed. When considering challenges for in-cabin visual navigation, intra-vehicular environments differ from indoor and outdoor scenes on Earth due to the nature of spacecraft: absence of a gravity vector, occlusions from unorganized cargo bags, etc. To address these issues, we release new visual navigation datasets acquired in challenging interior environments of ISS, which have not been covered by existing datasets. The datasets are captured by the Astrobee free-flying robots onboard the ISS since 2019 during intra-vehicular activities, including interior environmental surveys (e.g., systems inspection, monitoring, and sound level measurements). We also benchmark six state-of-the-art visual odometry (VO) and SLAM algorithms on the proposed Astrobee datasets. You can see more deltails in our paper.
The Astrobee Dataset
Our datasets consist of various intra-vehicular activities of Astrobee free-flying robots currently operating on the ISS between May 13, 2019 and July 14, 2022.
The datasets are collected inside the largest single ISS module, the Japanese experiment module (JEM) nicknamed Kibo, and contain ground-truth 6-DoF camera poses.
Download
We provide each Astrobee sequence in the TUM RGB-D format and the original bag file. Each sequence is compressed as a single ZIP archive which contains a description file, images,
calibration parameters, ground-truth, and IMU measurements.
Test and Debugging
| sequence | duration(s) | Download | Original bag file |
|---|---|---|---|
| td_roll | 63 | link | link |
| td_pitch | 75 | link | link |
| td_yaw | 50 | link | link |
| td_dock | 98 | link |
Intra-Vehicular Activity
| sequence | duration(s) | Download | Original bag file |
|---|---|---|---|
| iva_kibo_trans | 229 | link | link |
| iva_kibo_rot | 196 | link | link |
| iva_hatch_inspection1 | 403 | link | |
| iva_hatch_inspection2 | 521 | link | |
| iva_watch_queenbee | 236 | link | |
| iva_robot_occulusion | 192 | link | |
| iva_ARtag | 62 | link | link |
| iva_badlocal_rotation | 313 | link | |
| iva_badlocal_descend | 244 | link |
Free Flight
| sequence | duration(s) | Download | Original bag file |
|---|---|---|---|
| ff_return_journey_forward | 402 | link | link |
| ff_return_journey_up | 413 | link | link |
| ff_return_journey_down | 398 | link | |
| ff_return_journey_left | 303 | link | link |
| ff_return_journey_right | 328 | link | |
| ff_return_journey_rot | 108 | link | link |
| ff_JEM2USL_dark | 32 | link | |
| ff_USL2JEM_bright | 92 | link | |
| ff_nod2_dark | 296 | link | |
| ff_nod2_bright | 265 | link |
Dataset Format
We provide each Astrobee sequence in the TUM RGB-D format in the following format:
Distorted and Undistorted Images
We provide both original raw distorted images(with FOV lens distortion) and the undistorted images using existing dataset parsing tools.
- The distorted images are stored in "gray_raw" folder as 1280x960 8-bit gray images in PNG format.
- The undistorted images are stored in "gray" folder as 1280x880 8-bit gray images in PNG format.
- The name of the image file is [timestamp.png].
- The list of all images and their timestamp are also stored in "gray.txt" text file in [timestamp filename] format.
- Timestamp are in integer nanoseconds UNIX.
Ground-Truth Trajectories and IMU
We provide the Ground-truth trajectories in text file containing 6-DoF camera poses for all images. We also provide the angular rates and acceleration measurements from IMU.
- The ground-truth trajectories are stored in "groundtruth.txt".
- Each line in the groundtruth text file contains a single pose of nav_cam as [timestamp tx ty tz qx qy qz qw] format.
- The IMU are stored in "imu.txt".
- Each line in the imu text file contains timestamped gyro and accelerometer measurements as [timestamp wx wy wz ax ay az] format.
Intrinsic Camera Calibration Parmeters
We provide the intrinsic camera parameters for both (raw / undistorted) images in text file.
- The intrinsic camera parameters for the distorted images are stored in "distorted calib.txt" with FOV lens distortion coefficient as [fx fy cx cy w] format.
- The intrinsic camera parameters for the undistorted images are stored in "undistorted calib.txt" as [fx fy cx cy] format.
Astrobee Platform
The Astrobee free-flying IVA robots used for dataset collection. This is the positions of the sensors and the rigid body transformations that link them.
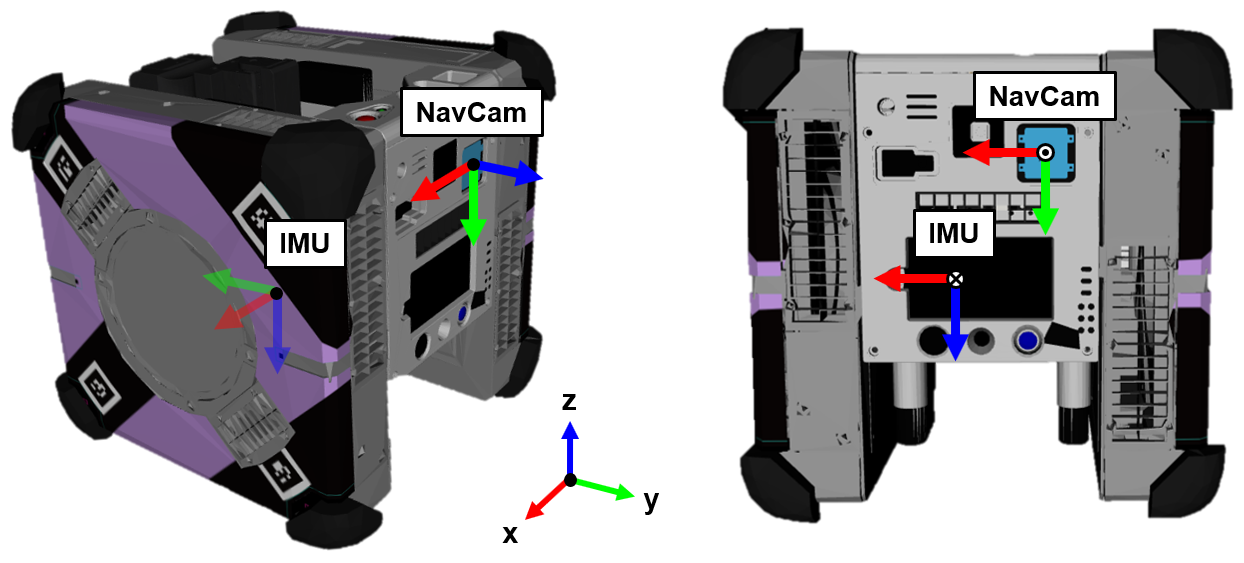
- NavCam provides monocular image sequences at 15 Hz.
- IMU are logged at 250Hz and expressed in IMU body cam.
BibTex
Contact
You can send feedback and questions to:
- Pyojin Kim : pjinkim1215@gmail.com
- Suyoung Kang : suyoungkang1222@gmail.com